

So far we have motivated the need for modular design in power systems, developed a modular power system model, and derived a general purpose modular stability criterion. Today we are going to put it all together, and derive a modular stability criterion that is tailored specifically to the power system model.
The stability guarantee
The principal difficulty in applying the modular tests from last time to the power system model lies in interpretting the network classes in the stability guarantees. We will address that in this section by defining a stability guarantee that is written in terms of the transmission network models from the power system model. To do so requires an assumption about the operating point of each transmission line.
First, recall that the transmission line model we used was
\[P_l(t)=Y_l\,(\theta_x(t)-\theta_y(t)),\]
where the model parameter \(Y_l\) was given by
\[Y_l=\frac{|V|_x|V|_y}{X_l}\cos{(\theta_{x,\textrm{eq}}-\theta_{y,\textrm{eq}})}.\]
In this equation \(X_l\) is a constant that depends on the properties of the line. \(|V|_x,|V|_y,\theta_{x,\textrm{eq}}\) and \(\theta_{y,\textrm{eq}}\) are also constants, however their values depend on the operating point. More specifically, they correspond to the voltage magnitudes and angles at either end of the line, at the operating point. We will make an assumption about the range of values these can take:
Assumption I: The operating point of every transmission line in the network is such that the voltage magnitudes at either end of the line are less than or equal to a number \(|V|_{\max}\), and the difference between the voltage angles is less than \(90^\circ\).
This is a very mild assumption, and just places a limit on the sizes of the voltage magnitudes and angles at the operating point. In practice, transmission networks are designed to avoid voltage magnitudes above \(1.05\) per unit (we could use this for \(|V|_{\max}\)) and angle differences above \(15^\circ\). This is because operating outside these ranges leads to thermal and voltage drop problems for AC transmission lines (that we haven’t modelled). Roughly speaking, if Assumption I doesn’t hold, the transmission line won’t function predictably, and stability of the operating point is the least of our worries.
We are now ready to state the stability guarantee.
The \(\mathbf{A}\) matrix in the structured power system model has no eigenvalues in the right half-plane, except possibly for some simple eigenvalues on the imaginary axis, for all transmission network models with lines that satisfy Assumption I.
— power system stability guarantee
This stability guarantee is of the form of modified stability guarantee (2) from last time. In essence it means that the power system model is stable for every possible transmission network model.
The modular test
In this section we will give a modular test that can be applied to the power system component models. Provided every component model passes this test, the power system stability guarantee is obtained.
Just as last time, the modular test depends on the transfer function
\[p_i(s)=\mathbf{C}_i(s\mathbf{I}-\mathbf{A}_i)^{-1}\mathbf{B}_i,\]
which can be obtained directly from the model of the power system component dynamics. However this time we also need an additional parameter:
\[\gamma_i=\sum_{l\in\textrm{neighbours}}\frac{2|V|_{\max}^2}{X_l}.\]
Here the summation just means, sum up over the transmission lines that are connected to the terminals of the \(i\)-th component. We can now state the modular test.
For all \(s\) in the right half-plane
— power system component test
\[\mathrm{Re}\left(h(s)(\gamma_i{}p_i(s)+1)\right)>0,\]
where \(h(s)\) is positive real.
And that’s all there is to it! This minor modification of modified modular test (2) will provide power system stability guarantee. This test can be understood and checked with the domain colouring technique explained last time. We will see an example of this below.
A simple example
To give an idea of how to use these modular tests, lets illustrate them for a simple class of component models. In particular, suppose that each component model takes the form
\[\begin{aligned}
\dot{x}_{i}(t)&=\begin{bmatrix}-\frac{D_i}{2H_i}&0\\1&0\end{bmatrix}x_{i}(t)+\begin{bmatrix}\frac{1}{2H_i}\\0\end{bmatrix}P_{P,i}(t),\;x_{i}(0)\in\mathbb{R}^{n_i},\\
\theta_i(t)&=\begin{bmatrix}0&1\end{bmatrix}x_{i}(t).
\end{aligned}\]
These are the so called swing equation dynamics. The parameters \(H_i>0\) and \(D_i>0\) are inertia and damping constants. These equations are often used to describe the behaviour of synchronous machines when considering frequency control problems.
Let us try applying the power system component test to models from this class. First we form the component transfer function, which in this case equals
\[p_i(s)=\frac{1}{2H_is^2+D_is}.\]
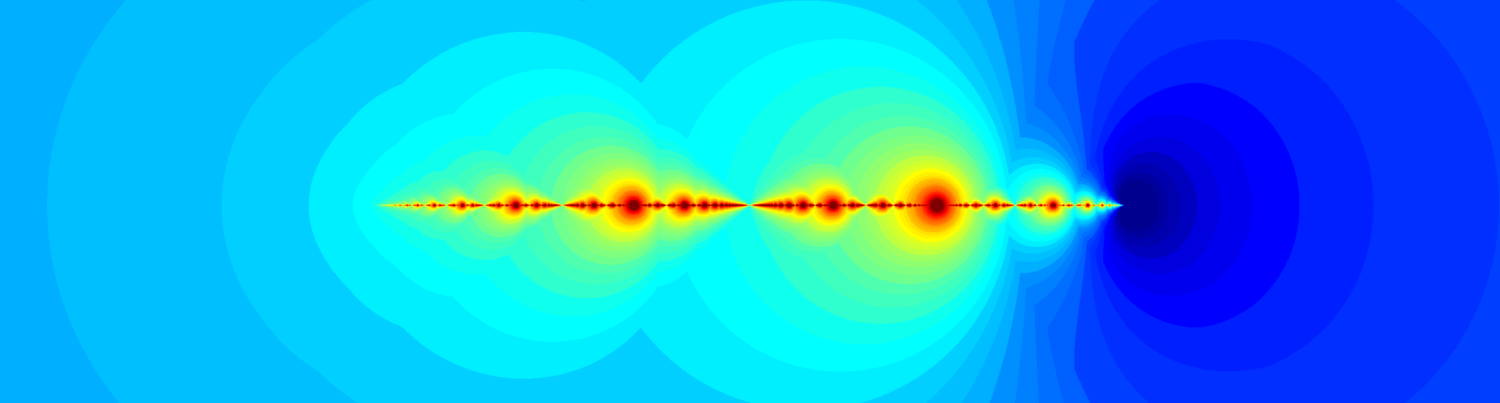
To get a feel for the modular test, lets just try it out for \(h(s)=H_i=D_i=1\) and various values of \(\gamma_i\).

This figure shows that the power system component test is almost passed for \(\gamma_i=1/2\). The only problem is that the red region in the domain colouring is just touching the origin in the \(s\)-plane. Unfortunately things start getting much worse as we increase \(\gamma_i\).

However we notice that the white spine still lies in the left half-plane for all the domain colourings. This gives us hope that by adjusting \(h(s)\) we can pass the modular test for a wide range of parameters \(\gamma_i\).
The first thing we have to do is add a zero to the function \(h(s)\) at the origin. This is because the functions \(p_i(s)\) have a pole at the origin, and unless we cancel this, the point \(s=0\) will always be coloured red in the domain colouring. After that, it is just a question of playing around a bit. The function
\[h(s)=\frac{s}{s+T}.\]
is always positive real if \(T\geq{}0\), so we start there. A few trials shows that if we make \(T\) large, all the tests are passed, even for very large values of \(\gamma_i\).

It turns out that the test is also passed when we try increasing and decreasing \(H_i\) and \(D_i\). In fact, as proved in the paper as Corollary 1:
If \(h(s)=s/(s+T)\), where \(T\) is sufficiently large, then a component with transfer function
\[p_i(s)=\frac{1}{2H_i{}s^2+Ds}\]
will pass the power system component test for any positive values of \(H_i\), \(D_i\) and \(\gamma_i\).
This shows that for a suitable choice of \(h(s)\), synchronous machine models will always pass the power system component test. This means that if the power system just consisted of synchronous machines, the power system stability guarantee would be valid. Of course this isn’t the case, but it gives us hope that other types of component can be similarly handled — especially since we haven’t designed any controllers yet. Next time we will see how to design component control systems with the specific objective of passing these modular tests.
Why does this modular test provide the power system stability guarantee?
I’m going to have to take a break from writing until August, so this will have to wait — feel free to check out the paper for the details, or work it out yourself from the previous posts!
1 Response
[…] Part IV: Explain how the stability criterion applies to the power system model; […]