
My goal is to develop a general and practical theory of modular control system design. This theory aims to overcome challenges arising in the control of interconnected systems, for example maintaining stability in electrical power systems with high levels of renewable generation. The key feature of my approach is that it can be used to design control systems that guarantee in advance that robust performance can be maintained even as components are interconnected. It is through this mechanism that my tools can be used to design for “well organised complexity” in large and highly uncertain interconnected systems.
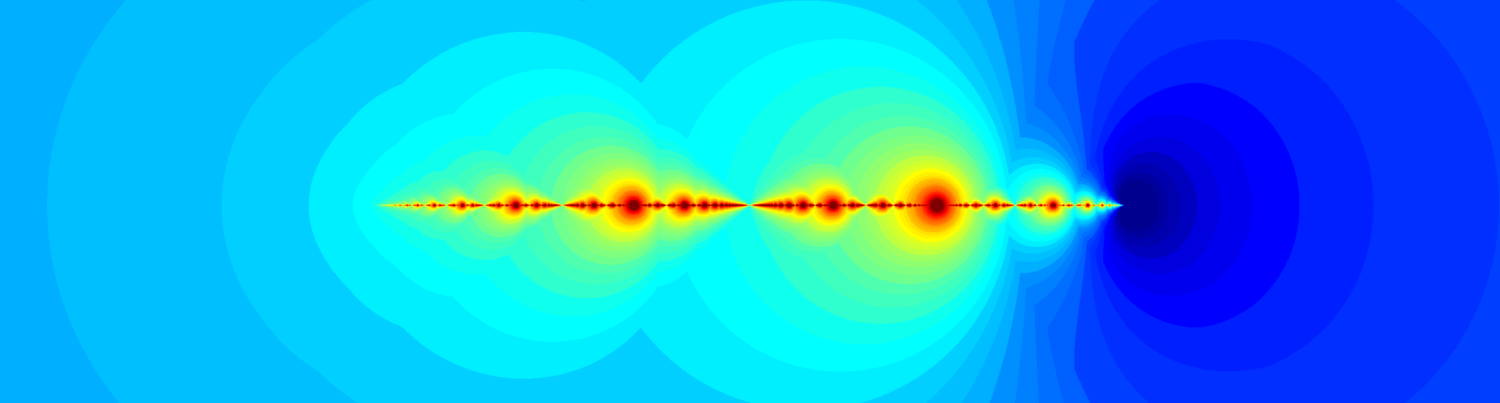
Why Modular Design? Complexity is a central problem in modern system theory and practice. Because of our intensive and limitless desire to build and to control ever larger and more sophisticated systems, the orthodox concept of a high performance system driven by a central computer has become obsolete. […] It is becoming apparent that a “well-organised complexity” is the way of the future. Control system design is typically based on a nominal mathematical model of a system. Powerful mathematical techniques are then used to design controllers to meet pre-specified robust performance specifications. This paradigm often fails to design suitable controllers for interconnected systems with high levels of uncertainty – such as electrical power systems or the Internet – for two main reasons: Taking a modular approach directly addresses both these issues, since it removes the need for a centralised coordinator to implement the control, and performance is guaranteed by design no matter how the components are interconnected. Ireland’s struggles with grid stability perfectly highlight the demand for modular techniques. Ireland has one of the highest levels of wind penetration in the world, and provides on average around 20% of its energy needs through wind. However Ireland is resorting to wind curtailment when wind production exceeds 50% of the existing demand. But why? After all this energy is to all intents and purposes “free”? The reason — a loss of grid stability. The question for the control engineer is then: How should this stability problem be addressed? A conventional approach would require a nominal model of the Irish power grid. But what nominal model should be used in this case? One with or without large numbers of wind turbines connected to the grid? And if with, with how many? One could of course try to model all the different scenarios individually, but a quick back of the envelope calculation reveals the impossibility of this. As of 2018 Ireland has 124 operational wind farms, and even if we only consider the possibility of them being connected or disconnected, that is \(2^{124}\approx{}10^{37}\) different scenarios. This number is so large as to rule out any conventional analysis method directly. When we consider that controller synthesis questions are generally even more complicated, and that Ireland is actually part of the far larger EU grid, it is clear that for these problems a conventional model based approach is not suitable. A modular approach is, in my opinion, the simplest and best alternative. My Work Modular Design Methods The modular approach aims to design control systems for individual components in a system in such a way that performance can be maintained even as they are interconnected. My research in this area explores how this can be done. My contributions to modular design are based on the idea of a stability certificate. Stability certificates are allocated on a component by component basis, and awarded if the component satisfies a particular requirement. This requirement is chosen in such a way that provided every component has a stability certificate, stability of the overall system can be guaranteed even as the components are connected and disconnected. This whole process has the following key properties: In the power system case this could be used, for example, to design controllers for individual wind turbines in a way that guarantees that system-wide stability is maintained even as they are connected or disconnected from the grid, in a simple, and certifiable, manner. The major research challenge here is to develop the stability certificate `requirement’ discussed above. It must both guarantee stability even as components are interconnected, and are be applicable in networks with dynamically diverse and complex components. My main contributions have hinged upon exploiting network structure to develop versions of some of the most powerful existing controller design methods which additionally have these properties. Take for example the Nyquist stability criterion. The Nyquist stability criterion is a central result in control theory. It allows the stability, robustness, and performance of a single feedback interconnection to be deduced from properties of the individual components in the loop. My contribution was to extend this result so that it could be applied in the interconnected system setting, where there are many components interconnected through many feedback loops. In particular I showed that it is possible to deduce stability of the interconnected system on the basis of independent Nyquist like tests on each of the individual feedback loops. These tests depend on the augmented Nyquist diagram shown above. The shaded region is obtained by drawing ellipses frequency by frequency on top of the standard Nyquist diagram for an individual feedback loop. Roughly speaking, provided the augmented Nyquist diagram of every feedback loop satisfies the usual Nyquist criterion, then stability is guaranteed. This augmented Nyquist diagram can be used to generate a stability certificate. Components are allocated a stability certificate provided the feedback loops they are part of satisfy the augmented Nyquist criterion. The augmented Nyquist diagram can be used in exactly the same way as a standard Nyquist diagram to design controllers with high levels of robustness and performance — the only difference being that now these guarantees are apply to the interconnected system, as well as the individual feedback loops. Supporting Publications: Fundamental Limitations The modular approach offers a simple and provable way to maintain performance in interconnected systems. My research in this area looks to explore what can be achieved with a modular approach. The premise of the modular approach is to get the local design right. But can all network behaviours be effectively regulated this way? An interesting test-bed for such questions is the control of vehicle platoons, where it seems that local behaviours (the distances between the individual cars) can be effectively regulated locally, but global behaviours (the length of the platoon), in some sense, cannot. The control of these global behaviours have intimate links to the regulation of traffic jams, and are closely related to behaviours in other domains, for example inter-area oscillations in power systems. The implication of this is that in some situations a modular approach should be supplemented by some form of global coordination. The features of these fundamental behaviours ultimately dictates how this needs to be done, for example, what information is required, and to what accuracy and on what time scale. Therefore a deeper understanding of these network phenomena is of central importance when designing scale-free controllers, and more generally, system architectures for networks. My work in this area has centred around networks with a string like topology, such as vehicle platoons. My main contributions have been to show that this type of modular structure imposes Bode-like performance constraints, as well as some entirely new performance limitations. It has also shown that Nyquist like design methods based on complex iterative maps offer a promising way to conduct design so that good levels of performance can still be maintained. Supporting Publications: The best way to keep up to date with my work is to subscribe to my research blog or follow me on Twitter.
collaborators: Glenn Vinnicombe, Enrique Mallada

Scalable Design of Heterogeneous Networks
IEEE Transactions on Automatic Control.
[pdf]
Decentralised Robust Inverter-based Control in Power Systems
IFAC 20th World Congress
[pdf]
A Loopshaping Approach to Controller Design in Networks of Linear Systems
IEEE Conference on Decision and Control (CDC).
[pdf]
Stability Certificates for Networks of Heterogeneous Linear Systems
IEEE Conference on Decision and Control (CDC).
collaborators: Kaoru Yamamoto, Anders Rantzer

Scale Free Bounds on the Amplification of Disturbances in Mass Chains
IEEE American Control Conference (ACC).
[pdf] [blog post]
Sensitivity Function Trade-Offs for Networks with a String Topology
IEEE Conference on Decision and Control (CDC).
[pdf] [blog post]
Control Using Local Distance Measurements Cannot Prevent Incoherence in Platoons
IEEE Conference on Decision and Control (CDC).
[pdf]